

Mechatronics and Robotics, M.S.
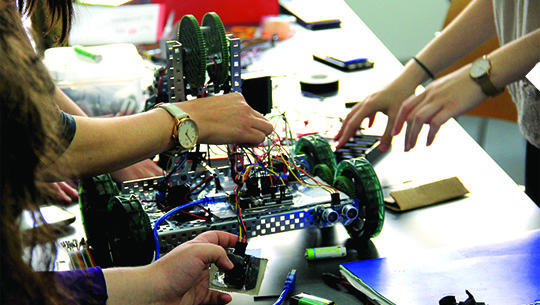
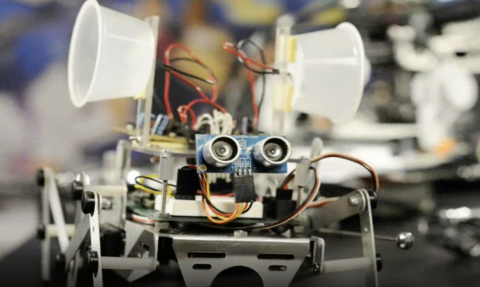
Students in this program learn fundamental theory, modeling methods, hardware components, interfacing requirements, simulation and programming tools, and practical applications of mechatronics and robotics.
On Campus